噪音:SNR与视觉噪音
分辨率测试卡的噪声是图像质量评估的重要参数。作为每个像素的随机信号变化,噪声源于光的物理特性(光子射击噪声)和传感器的技术限制(暗电流和读取噪声)。

描述噪声的一种非常常见的方法是将其报告为信噪比(SNR)。要测量成像设备的SNR,您可以遵循ISO 15739标准。
SNR越高,我们在图像中发现的噪声越少。
这可能是故事的结尾,但遗憾的是,SNR并没有很好地反映出来:
观察者在图像中实际看到了多少噪音?
我们从1997年开始测试数码相机,并且长时间使用SNR作为噪声的测量。五年多以前,我们已经看到了这样的影响,即SNR测量的结果不再反映观察者的经验。因此,相机具有相似的SNR值,但噪声的外观不同。并且相同的噪声外观可能导致不同的SNR值。
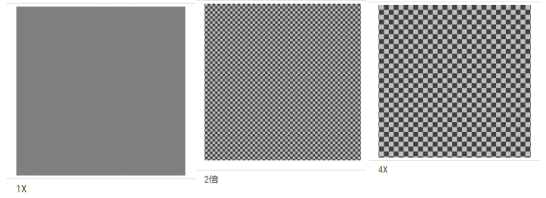
对于这篇文章,我们准备了三个样本图像,1x,2x和4x来说明问题:
想象一下,这些图像应该是均匀的,但会显示出一些噪音。如果您远离屏幕,您可以看到所有三个图像具有相同的平均值并且看起来均匀。
如果您靠近屏幕,很明显您可以在图像4x中看到比图像1x更多的“噪点”。
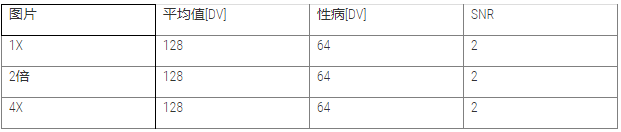
如果我们测量SNR,我们会看到所有图像具有相同的平均值,所有像素值的标准偏差相同,因此信噪比相同。
该样本显示SNR仅反映噪声总量,但未描述人类观察者实际感知噪声的方式。
视觉噪音
因此,为了描述人类观察者在图像中实际看到多少噪声,以及这是否令人不安,我们不使用SNR。相反,我们使用称为视觉噪声的测量。
ISO 15739中描述了测量视觉噪声的算法和程序,并且从标准的规范部分转移到信息附件到2013年的标准修订版。
可视噪声值易于理解:值越高,观察者将看到的噪声越多。SNR和VN之间的主要区别在于,VN将根据可见性对噪声进行加权。噪声测量不会考虑无论如何都看不到的噪声。
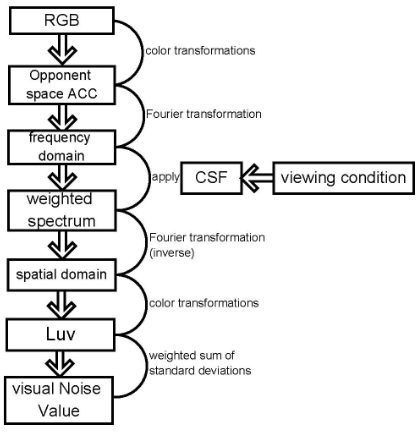
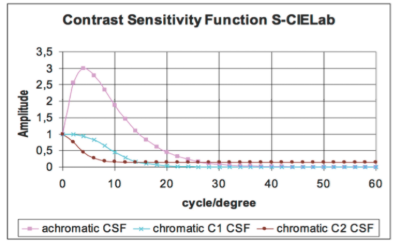
我们如何知道观察者可以看到哪种噪声?
可以模拟人类视觉系统对空间频率的响应。对比灵敏度函数(CSF)与观察条件的假设允许我们计算噪声频谱的不同部分的重要性。因此,从上面的示例:图像1x将在高空间频率中具有其大部分“噪声”,其在CSF中具有低响应。图像4x在较低的空间频率中具有大部分“噪声”,根据CSF可以很好地